
Hot on the heels of my official Raspberry Pi SenseHAT, Mr Postman brought me the Pimoroni Flotilla. I got this early because I backed it on Kickstarter, ooh quite a long time ago now, and I’d almost forgotten about it. A very welcome early Christmas present from the crew at Sheffield’s Pimoroni.
Flotilla is billed as ‘friendly electronics’ – modular sensors and LED output devices you plug into your Raspberry Pi, with no soldering required. As such, you might think there’s an overlap with the SenseHAT, but they are very different. The SenseHAT is self-contained, it plugs directly onto the pins on your Pi and you program it in Python. Flotilla, on the other hand, is anything but self-contained:
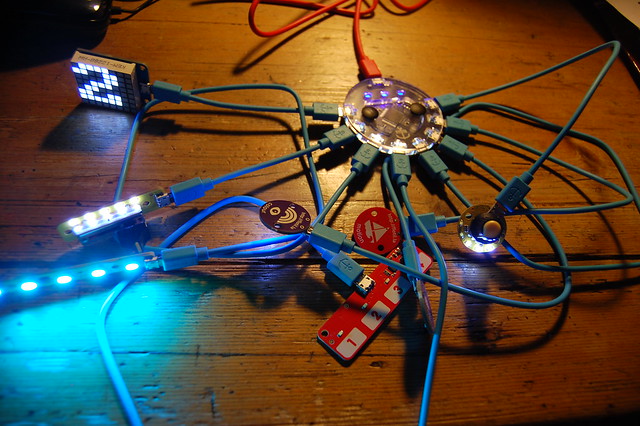
The heart of it is the ‘dock’ – a round device that plugs into the Pi’s USB port. It has 8 sockets to plug in ‘tentacles’ which you attach input and output devices to. The attention to detail on these is amazing – the blue leads have little anchors embossed on the plugs, and as is the way with Pimoroni, the graphics are beautiful in a very Sheffield-ish kind of way:

Once a studio manager, always a studio manager – so rather than reading any instructions I just plugged it all in and played with it to try to figure out what it would do. You program it using a web interface called ‘Rockpool’:

You click on inputs, which can be physical devices or patterns like a sine wave or saw-tooth wave, do stuff in the middle, and then pipe things to output devices on the right.
I can see Flotilla appealing very much to younger children, and I will save the diorama cut-out cards supplied for my KS2 computer club next term, to see what they make of it – I think my own children are probably too old for this.

Here’s a very simple project I knocked up in a couple of minutes, using the colour sensor to detect and mimic colours on my patchwork Elmer tablecloth. I piped the red input to the red output on the led strip, green to green and blue to blue:

And here’s the result:
I’ve only scratched the surface with Flotilla – it’s clearly got lots of potential and I like the way you can get a simple project running in seconds with the scope to build much more complex and sophisticated projects later on.
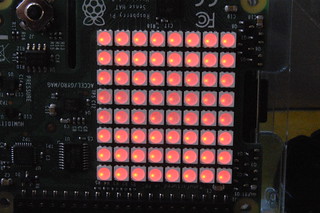
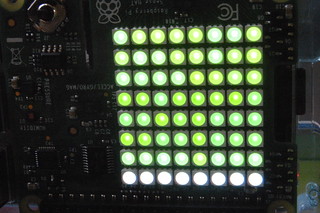
My ‘large starter kit’ came with an RGB LED colour strip and an 8×8 text/numerical LED matrix display as output devices, and lots of input devices: a 4 button touch pad, a rotary dial, a linear fader, a thermometer/baromoter, a motion sensor, and a colour sensor – plus blue leads, or ‘rope’, to attach them all to the dock. Installation of the software was quick and easy and included a nice touch in the command line:
I look forward to many adventures aboard my Flotilla, and seeing what projects other folk (especially kids) come up with. Children always have the best ideas when you give them creative toys like this (and I don’t use the word ‘toys’ in a negative way at all – play is good!).
(Pirate) hats off to the Pimoroni team!